Replaying Data in Scripts
Data replay is the ability to take data from log files and write it back into live components. This is a very convenient ability if you want to test your algorithm with a specific data set, to test on synthetic data sets, or if the message producer is not available all the time.
In this tutorial, we subsistute the message producer of the basics tutorial by a log file which was previously on the “live” system.
The basic workflow is to get a logfile context using Orocos::Log::Replay and then access the log streams as if they were tasks and ports:
#library for displaying data
require 'vizkit'
#load log file
log = Orocos::Log::Replay.open("message_producer.0.log")
#now you can access all logged data by
#addressing them by their task and port name
#log.task_name.port_name
#start deployment
Orocos.run 'messages::Consumer' => 'message_consumer' do
message_consumer = Orocos.name_service.get "message_consumer"
log.message_producer.messages.connect_to message_consumer.messages
#still needed since we added "needs_configuration"
#in the orogen task definition
message_consumer.configure
message_consumer.start
#open control widget and start replay
Vizkit.control log
Vizkit.exec
end
If, instead of pushing the data to a component, you want to process it in Ruby, you can redirect it to code blocks:
require 'vizkit'
log = Orocos::Log::Replay.open("message_producer.0.log")
Orocos.run 'messages::Consumer' => 'message_consumer' do
message_consumer = Orocos.name_service.get "message_consumer"
log.message_producer.messages.connect_to message_consumer.messages
message_consumer.configure
message_consumer.start
# Redirect data to a code block
log.message_producer.messages.on_data do |sample|
puts sample.time
end
Vizkit.control log
Vizkit.exec
end
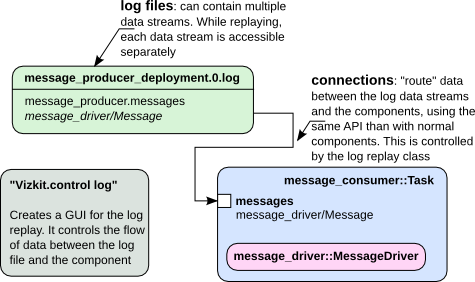
The dataflow of the replay mechanism looks like: