The TimestampEstimator class
The TimestampEstimator class, which lies in the aggregator package, is used to remove the jitter out of a periodic time stream. Basically, once configured, one gives it a time in a time series that (1) is periodic (2) can (rarely) contain lost samples and/or bursts, and returns the best estimate for the provided time.
One design criteria for this class is that it has to be zero-latency, i.e. the timestamp estimator never delays the processing of a sample.
Timestamper Usage
Since the timestamper relies on being provided most of the time events in the periodic time stream it is estimating, it is, in Rock, usually not used in the drivers. It is integrated in the oroGen tasks instead. As usual in Rock, it is a separate C++ library, so it can also be used in other C++ libraries outside of oroGen.
However, this page will describe the usage in the context of oroGen.
To use it, one first adds the aggregator package in the list of dependencies and adds the corresponding using_library statement in the orogen file:
The manifest.xml:
<depends package="drivers/orogen/aggregator" />
The orogen file:
using_library "aggregator"
import_types_from "aggregator"
Finally, one declares an aggregator::TimestampEstimator instance variable in the task’s header, initializes it to NULL in the task’s constructors.
Additionally, the estimator is supposed to be
- created in the configureHook of the task
- reset in the stopHook of the task
- deleted in the cleanupHook
At creation time, one parameters is required: the estimation window. The timestamp estimator continuously estimates the device period by averaging the duration between successive samples on a certain time window. For stability reaons, that time window should be chosen pretty big (~ 20s is usually a good starting point). If your device period is known to drift, you should choose a window that is at most 10% of any significant drift time (i.e. if the period changes more than 10% after 10s, the window should be at most 1s)
Additionally, it is recommended to provide the expected device period. At initialization, the estimator does not have any information about the time stream it has to estimate, which makes it initially very sensible to jitter (i.e. the estimated times will be pretty bad). Providing an expected period – which is usually available from the device type and configuration – improves the initial estimation quite a lot.
As an example, the setup of the Xsens IMU, when configured at 10Hz, would be:
mTimestamper = aggregator::TimestampEstimator(
base::Time::fromSeconds(10),
base::Time::fromMilliseconds(10));
Then, in the updateHook, one gets its best estimate with:
data = mDriver->getSample();
data.time = mTimestamper->update(data.time);
Do not forget to reset the estimator in the startHook (or stopHook)
mTimestamper->reset();
Handling bursts and lost packages
The main issue here is that late samples look very much – from the point of view of the estimator – like lost samples.
Let’s take our IMU, and see a realistic case for latency and jitter during execution:
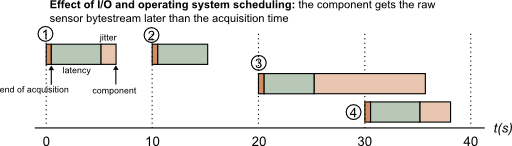
In this example, when the component receives sample 3, how can it know whether it is sample 3 or sample 4 ? Indeed, sample 3 is received after the expected minimum reception time of sample 4, so it could either be sample 4 early or sample 3 very late.
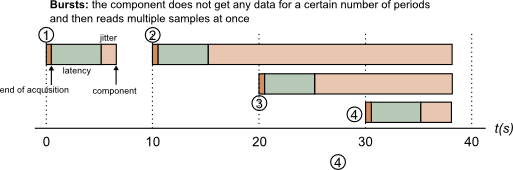
In case of actual bursts (i.e. when the component receives multiple samples at once), the same issue arises: since the estimator is not allowed by design to store samples.
This situation can ideally be solved by indexes provided by the sensor. Some sensors count how many samples it generated so far and provides this information inside the data stream itself. In this case, this index can be explicitely provided to the estimator (you have to be careful about wraparounds).
data.time = mTimestamper->update(data.time, mDriver->getIndex());
If no index is available, the estimator itself has a threshold-based mechanism to choose between the lost sample case or the delayed sample case. The last parameter of the constructor provides a loss_limit number of periods:
- if a sample i+1 is received and t(i+1) - t(i) <= P*loss_limit, then the estimator will think that the sample has been delayed
- if a sample i+1 is received and t(i+1) - t(i) > P*loss_limit, then the estimator will think that one sample has been lost.
Finally, if you have a mean to determine data loss other than the index, you can announce lost samples to the estimator:
mTimestamper->updateLoss();
Estimating latency through hardware timestamps
As we already explained, a lot of sensors nowadays provide hardware pulses that announce a precise event in their data acquisition process. If such a source is available to you, these (properly timestamped) events can be fed to the estimator with
mTimestamper->updateReference(hardware_time);
where hardware_time is a base::Time object;
TimestampEstimator at the oroGen level
The parameters from the timestamp estimator are mostly internal (i.e. can be determined by the component itself). The only parameter that is system-specific is the loss_threshold (to determine if a sample is lost or delayed).
If the device for which you write a component does not provide other means to determine sample loss, then it is advised to define a property called “sample_loss_threshold” of type int to parametrize this option. The default value for it should be 2 (unless your device, by itself, has a bursty behaviour).
in the task_context block of your oroGen file:
property("sample_loss_threshold", "int", 2).
doc "timestamp estimator configuration"
And in the configureHook, add a parameter to the constructor (3rd parameter)
mTimestamper = aggregator::TimestampEstimator(
base::Time::fromSeconds(10),
base::Time::fromMilliseconds(10),
_sample_loss_threshold.get());
Moreover, it is also advised to output the timestamp estimator’s status structure on a port called “timestamp_estimator_status”:
In the oroGen file:
output_port "timestamp_estimator_status", "/aggregator/TimestampEstimatorStatus"
In the updateHook:
_timestamp_estimator_status.write(mTimestamper.getStatus());
Finally, if your device does offer external triggering / hardware pulses, you should also add a “hardware_timestamps” input port of type base::Time that will be fed to the estimator:
In the oroGen file:
output_port "hardware_timestamps", "/base/Time"
In the updateHook:
base::Time hw_time;
while (_hardware_timestamps.read(hw_time) == RTT::NewData)
mTimestamper->updateReference(hw_time);