Log files are very import especially if it is expensive to run the software on the robot in the real environment like it is very much the case, for example, in underwater robotics. Therefore, it is the goal of Rock to provide the developer with tools which are doing all the hard work to replay logged data to all his components without changing his code more than necessary. For that reason it is possible to use the same GUI for displaying logged data as well as it is used to display live data.
If only the content of a log file matters and shall not be replayed to any component the tool named rock-replay can be used to inspect the log files. A double click on each listed message type will open a new widget which visualizes the message. If no specialised widget can be found, a tree view widget is used to display the content of the message.
rock-replay logfile1, logfile2, logfile3
As your usage of logging and Rock advances, it might be important to read this note about what time does rock-replay use to order the samples.
All the mechanisms which rock-replay uses to visualizes a log file can be easily used or extended by custom ruby scripts to display live data or log data.
For example, the code block below is using the same user interface as rock-replay does to replay a log file to a custom qt widget.
require 'vizkit'
#open the log file
replay = Orocos::Log::Replay.open("my.log")
#create window,button and text field
window = Qt::Widget.new
button = Qt::PushButton.new(window)
button.move(10,10)
text_field = Qt::TextEdit.new(window)
text_field.move 10,70
window.show
#get logged task
task = replay.mytask
#connect the logged output port with the text field
task.mystatus.connect_to do |data,port_name|
text_field.setText data.status.to_s
end
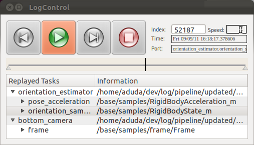
#show the control widget for the log file
Vizkit.control replay
#start gui
Vizkit.exec
The next example is pretty much the start script of rock-replay
require 'vizkit'
if ARGV.empty?
puts
puts "Programm for replaying log files"
puts "Usage:"
puts "replay logfile1, logfile2, ..."
puts
exit 1
end
log = Orocos::Log::Replay.open(ARGV)
#all ports shall be replayed
log.track true
Vizkit.control log
Vizkit.exec
If a specific port shall be replayed Vizkit can be used to automatically find a display widget which can handle the type of sample. This behavior can easily be extended by registering custom widgets with the method Vizkit.register_widget_for (see this page).
require 'vizkit'
replay = Orocos::Log::Replay.open('my.log')
Vizkit.display replay.mytask.myport
Vizkit.control replay
Vizkit.exec
To specify the widget which shall be used to display the samples of the port, the UiLoader class can be used to manually load widgets. A complete list of available widgets can be displayed by using the command line tool rock-list-widgets.
require 'vizkit'
replay = Orocos::Log::Replay.open('my.log')
#create a new struct_viewer widget
widget = Vizkit.default_loader.StructViewer
replay.mytask.myport.connect_to widget
widget.show
Vizkit.control replay
Vizkit.exec
If the same script shall be used to display remote tasks and later on log files the Orocos name service can be used to find the right task.
require 'vizkit'
Orocos.initialize
# load log files and add the loaded tasks to the Orocos name service
replay = Orocos::Log::Replay.open(ARGV) unless ARGV.empty?
# create a task proxy trying to connect
# to a task called "camera" with the help
# of the orocos name service
task = Orocos::Async.proxy "camera"
widget = Vizkit.default_loader.ImageView
widget.show
#connect port to the widget when reachable
task.port("frame_raw").once_on_reachable do
Vizkit.display task.port("frame_raw"),:widget => widget
end
Vizkit.control replay unless ARGV.empty?
Vizkit.exec