The result of this tutorial can be found in bundles/tutorials if you followed the instructions at the bottom of this page. While the tip of the master branch contains the accumulated result of all the tutorials, you can get the specific result of this one by checking out the transformer tag with
git checkout transformer
In a nutshell, Rock’s transformer is a mean to handle computation of forward kinematic chains in a component network. It allows each component to declare that it needs a given transformation between two declared frames and get it, without the component itself having to care how. You should read this page as an introduction to the transformer.
When using a system like the transformer, or ROS’ tf if you are familiar with it, it gets quickly difficult to ensure that all the frames used in the network are consistent. In a dynamic network, such as what Syskit enables, it is even more difficult: which frames are relevant for a particular component depends on which inputs and outputs it is connected to.
This tutorial will guide you through the transformer usage in Syskit, as well as what Syskit brings on the table w.r.t. reconfiguration and consistency-checking. It will do so by using tut_sensor::TransformerTask, a drop-in replacement for tut_sensor::Task component that uses the transformer, a modification we prepared for in the previous tutorial.
Enabling the transformer
Syskit’s transformer plugin needs to be enabled explicitly. Uncomment the following line in config/init.rb (all bundles created with rock-create-bundle have this line).
Syskit.conf.transformer_enabled = true
Assigning Expected Frames
Let’s now try to resolve the transformer-enabled follower:
# syskit instanciate -rtut-transformer follower_def!
could not find a frame assignment for target in TutSensor::TransformerTask:0x4880000{conf => [default]}[] (Transformer::MissingFrame)
Click on “Show transforms” in the dataflow view, and have a look at the TransformerTask task:
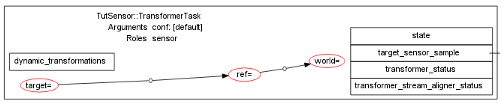
This shows the frames that TransformerTask requires. These are declared when writing the component. Indeed, if you look at tutorials/orogen/tut_sensor:
transformer do
# We need a reference frame (the follower's body) and the target frame
# (the leader body frame)
transform 'target', 'ref'
# Because the rocks reference frames are attached to the body (they
# 'roll', we also need the transformation from the world to the reference
# frame)
transform 'ref', 'world'
max_latency 1
end
How this works in Rock is that the frame names declared in the component are local to the component. One needs to provide a mapping between the names of these local frames and the corresponding actual names on the system. Outside Syskit, this is done by assigning the corresponding properties. When using Syskit, this is done by specifying the frame selection in the instance requirements. For instance, in the RocksWithTransformer profile in models/profiles/rocks.rb:
define 'follower', follower_def.
use(TutSensor::TransformerTask).
use_frames('target' => 'leader', 'ref' => 'follower', 'world' => 'world')
The actual frames also need to be specified in a transformer configuration block, in the same profile, but before the define:
transformer do
frames 'leader', 'follower', 'world'
end
We are not there yet, but let’s instanciate it:
# syskit instanciate -rtut-transformer follower_def!
cannot find a production chain for leader => follower
in TutSensor::TransformerTask:0x3c83fe0{}[]
(task-local: target => ref)
...: no transformation from 'leader' to 'follower' available (Transformer::TransformationNotFound)
Declaring Frame Transforms
Frames are not the only bit of information that the components require. They obviously require the actual transformations between the frames that they are configured with. In our case leader->follower and follower->world.
When configuring the transformer, one has to provide the necessary transformation chains, with a mix of static and dynamic transformations. Static transformations are directly provided in the transformer configuration, while dynamic transformations are provided at runtime by a component, or even a set of components. See this page for the static transforms syntax, which is common between ruby scripts and Syskit.
Specifying dynamic transformations is however different: in Ruby scripts, it is a task_name.port_name string. In Syskit, it can be any instance requirement – compositions, definitions, devices, …
In our case, the leader->world transformation is provided by the rock1 device, the follower->world transformation by the rock2 device. Let’s tell Syskit exactly this:
profile 'RocksWithTransformer' do
use_profile BaseRocks
transformer do
frames 'leader', 'follower', 'world'
dynamic_transform rock1_dev.use_deployments(/target/),
'leader' => 'world'
dynamic_transform rock2_dev.use_deployments(/follower/),
'follower' => 'world'
end
define 'follower', follower_def.
use(TutSensor::TransformerTask).
use_frames('target' => 'leader', 'ref' => 'follower', 'world' => 'world')
end
Notice here that the declared transformations must allow to create the required transformations. The transformer will combine the transformations as needed to provide the components with what they actually need
Finally, let’s have a look at the generated network:
syskit instanciate -rtut-transformer follower_def!
Syskit automatically added what was required to generate the transformation that the sensor component requires. Note that it is transparent: Syskit will always add (or reuse, if they are already in the network) the producers that a particular component needs, without having to specify it
If you actually want the leader to move, just tell Syskit so by also deploying the random definition:
syskit instanciate -rtut-transformer follower_def! random_def!
Frame Consistency
Another facet of the Syskit transformer integration is that it is able to check for frame consistency, and provide some automatic configuration mechanisms. This is a two-edged sword: you get an extremely useful consistency checking, and better support for reconfiguration abilities, but you need to provide more modelling to Syskit. This section will present what it can do, and how it is done.
The very first step is to assign frames to devices. As devices are (very often) hardware-related, this is actually the easiest as it happens very naturally (frames are often defined because of the devices). In the BaseRocks profile:
device(Dev::Platforms::Rock, :as => 'rock1').
frame_transform('leader' => 'world')
device(Dev::Platforms::Rock, :as => 'rock2').
frame_transform('follower' => 'world')
Then, since we use the rock devices as producers, we should model the transformation configuration on the corresponding tasks. Edit models/orogen/rock_tutorial.rb and make the RockTutorialControl class definition look like:
class RockTutorial::RockTutorialControl
driver_for Dev::Platforms::Rock, :as => 'driver'
transformer do
# Note: the local names have to match the names of the properties
# used to configure the source/target frames in the orogen file
# (body_frame and world_frame)
transform_output 'pose_samples', 'body' => 'world'
end
end
Adding this does not require the task to actually use the transformer (it does not even depend on it at the package level). This is declarative-only, and is used only to check for consistency among frames.
If we now instanciate the network and have a look at the frames, we see that the frames in the RockTutorialControl components have been set (no need to add a use_frames statement). This has been done automatically by Syskit since the corresponding devices have been declared as producers (Syskit can therefore deduce the local-to-global frame mapping).
Let’s now add a bit more, and express that the RockTutorialControl ‘motion_command’ input has to be expressed in the body frame as well. Still in models/orogen/rock_tutorial:
transformer do
transform_output 'pose_samples', 'body' => 'world'
associate_frame_to_ports 'body', 'motion_command'
end
And now, let’s do the same for the follower task. In effect, the follower task generates a motion command that is in the same frame than the reference frame of the bearing_distance input (i.e. it assumes that its sensor input is in the frame of the expected command output). Let’s express this as well in models/orogen/tut_follower.rb:
class TutFollower::Task
provides Base::Motion2DControllerSrv, :as => 'cmd'
transformer do
associate_frame_to_ports 'ref', 'bearing_distance', 'cmd'
end
end
And, finally, that the sensor output of TransformerTask is expressed in the ‘ref’ frame of the task in models/orogen/tut_sensor.rb:
class TutSensor::TransformerTask
transformer do
associate_frame_to_ports 'ref', 'target_sensor_sample'
end
end
If you now look in the result of syskit instanciate (don’t forget to show the
transformations), starting at the TutFollower task, you can see that there is a
chain of ports and frames that go through most of the components. Moreover,
notice that we did not have to add more use_frames statements in our definition,
Syskit could assign all missing frames.
Actually, we could even remove the ‘ref’ specification, since its value is required by the choice of rock1 as our ‘controlled’ rock:
define 'follower', follower_def.
use(TutSensor::TransformerTask).
use_frames('target' => 'leader',
'world' => 'world')
If you look a this definition more closely, you will see that the two frames that one must provide is the target frame – which obviously has to be specified as it tells what the rock will follow and the world frame, which is a byproduct of how the follower is implemented, and of some limitations of the current modelling 1 (any frame static in the world would do).
Changing what the follower would follow is therefore simply done by replacing which frame is selected as a target. Changing which device / system the follower controls is done by adding it to the use() statement. No need to modify anything else.
Sharing configuration between Ruby scripts and Syskit
When mixing ruby scripts and Syskit, it is customary to create a root transformer configuration file that lists the frame names as well as the static transforms. The convention is to call it config/robotname-transformer.rb, e.g. tut-transformer-transformer.rb
There should then be one file for scripts, config/robotname-transformer-scripts.rb that loads the previous one and adds the dynamic transformations, and then the relevant transformer blocks in the Syskit profiles, in which the file is loaded with
transformer do
load 'config/tut-transformer-transformer'
# Add dynamic transformations here, or in
# other profiles that 'use' this one
end
Summary
In this tutorial, we have seen how the Syskit-transformer integration allows to make the transformer configuration a part of the whole subsystem design, as well as making sure that the frame configurations are consisten across the network. Using this plugin, the frame selection becomes “just a part” of the overall system configuration, automated code making the transition between the Syskit description of components, ports and dataflow and the transformer’s description of frames, transformations and transformation producers.
The next tutorials will show you how to sequence different behaviours into state machines, monitor data streams and handle system faults. It starts with combining behaviours into state machines.
-
in principle, the motion commands and distance-bearing samples are constraining transformations, not frames, and therefore the ‘world’ frame could be propagated as well. This is a limitation in the current Syskit-transformer plugin. ↩