The result of this tutorial can be found in bundles/tutorials_scripts if you follow the instructions at the bottom of this page
Abstract
In this tutorial, you will learn how to deal with dependency injection in Rock’s system management layer. This feature allows you to specify abstract compositions, where some (or all) of the parts are not actual component instances but just component models (classes of components).
In a more concrete manner, this tutorial will show you:
- How to change the RockControl composition so that it can use any component able to output a /base/MotionCommand2D type, instead of just a joystick and
- how to select which command source should be used.
The next tutorial will then deal with the runtime workflow when using Syskit, e.g. how to switch between different modalities / sources and how to restart components that crashed.
Data Services
A data service describes two things:
- The (minimum) expected interface, i.e. what input and output ports a component needs to have in order to support the service and
- the expected functionality - what the component does with this data. This particular information is contained in the data service name.
For instance, a very common data service is the Base::PoseSrv service:
- As its name implies, it generates poses.
- As its definition requires (not shown here), it has a base::samples::RigidBodyState output port.
Other services (i.e. the Base::OrientationSrv service) would have the same output port, but their names would reflect the fact that they do something different.
Abstracting the command generator
In our case, we want to modify the result of the previous tutorial to allow the selection of the command generator, i.e. being able to use different generators.
The first step is to define a generic data service and naming it ‘CommandGeneratorSrv’. Copy the scripts/01_joystick.rb to scripts/02_services.rb and add the following at the top:
# Load the types the data service requires
import_types_from 'base'
# Defines a data service model
module Tutorials
data_service_type 'CommandGeneratorSrv' do
output_port 'cmd', '/base/MotionCommand2D'
end
end
This defines a data service model that can be accessed with Tutorials::CommandGeneratorSrv. These data services can be used in place of actual task contexts to signify that a composition needs (in this case) “some component that generated a command”. Let’s use it in the composition:
module Tutorials
# Declare the composition. The new model can be accessed with either
# Compositions::RockControl or Cmp::RockControl
class RockControl < Syskit::Composition
# Any command generator. We can omit the Tutorials:: prefix as RockControl
# is defined in the same namespace
add CommandGeneratorSrv, :as => "cmd"
# And one rock
add RockTutorial::RockTutorialControl, :as => "rock"
# Create any unique connection possible, by matching input and output ports
# of the same data type. If ambiguities exist, an error is generated
cmd_child.connect_to rock_child
end
end
and let’s make the instanciation fail:
syskit instanciate scripts/02_services.rb
You’ll get the following error, and you can see that some data services (red boxes) are still present in the graphical representation of the network:
= cannot find a concrete implementation for 1 task(s)
| placeholder for DataServices::CommandGenerator
| no candidates
| child cmd of Compositions::RockControl:0x7fc2ff5df470{conf => [default]}[]
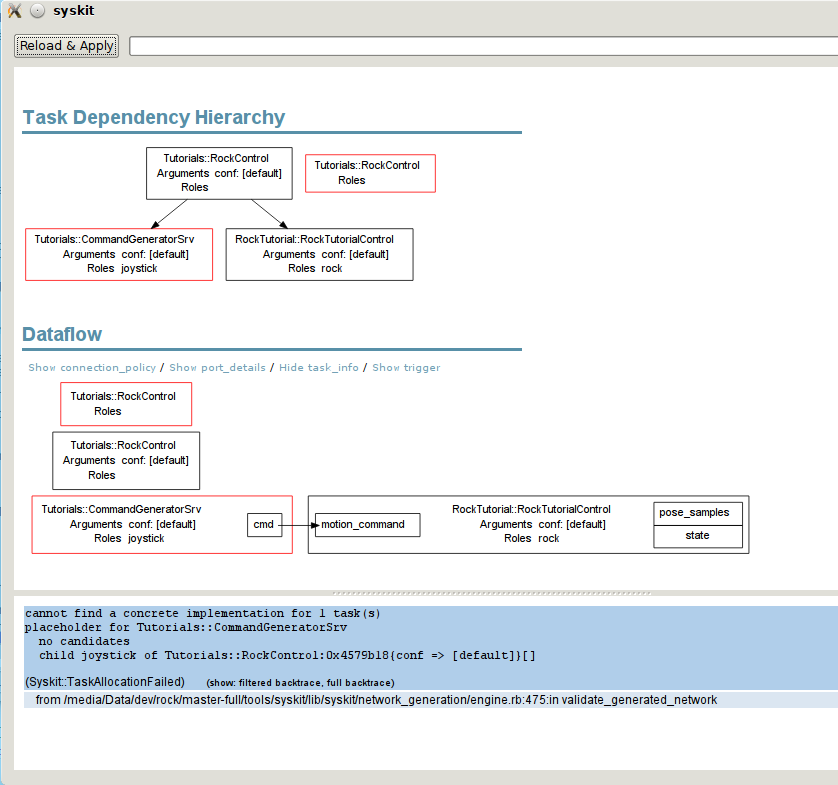
Snapshot of syskit instanciate (Click to zoom in)
Remember: Data services are abstractions of components. They can therefore not be executed (they are not actual components), and actual components must be selected in their place.
The first part is to declare which components provide the service, i.e. are valid choices for the data service. Add the following after the using_task_library ‘controldev’ statement:
Controldev::JoystickTask.provides Tutorials::CommandGeneratorSrv, :as => 'cmd'
This tells the system that an instance of controldev::JoystickTask provides the service ‘Tutorials::CommandGeneratorSrv’. The service thus declared must be given a name through the :as option. Syskit will verify that there are ports on the task that match the ports of the data service.
Note that the port types are important for matching connections and port names do not necessarily need to match between the service and the task. Syskit will map the names automatically if the mapping by type is unambiguous. If multiple ports could be used, it will check if there is one with the same name. If it is not the case, an error is generated and you will have to specify the mapping manually and try again.
syskit instanciate scripts/02_services.rb
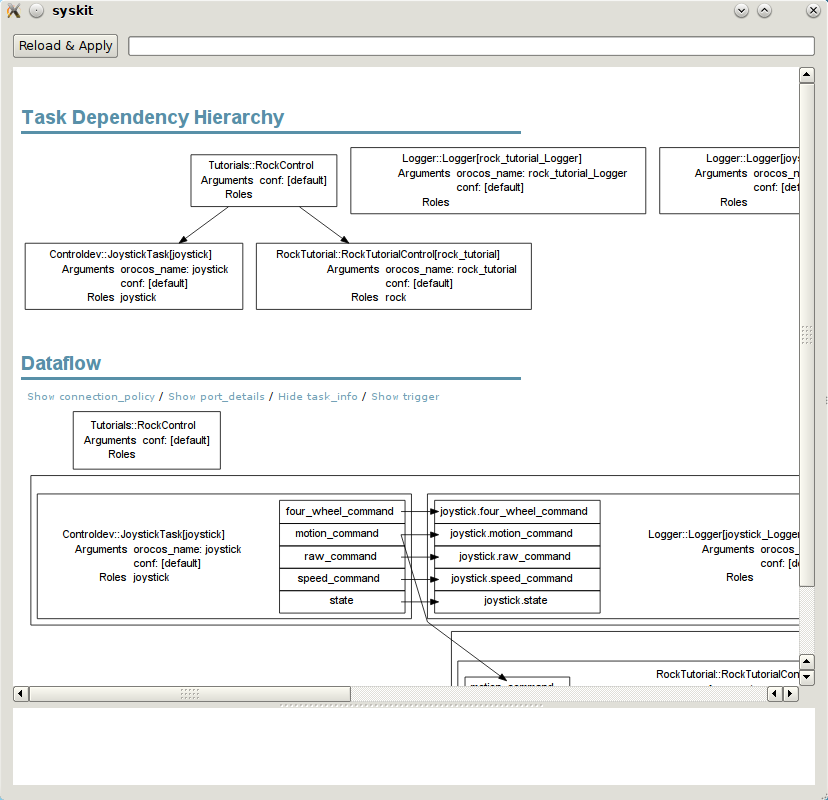
Syskit knows only one component that provides the CommandGeneratorSrv service, so it picked it up automatically and generated the expected network.
Adding a random-motion generator
The rock.tutorials package set contains the random-motion generator (tutorials/orogen/tut_brownian) that we will now use as an alternative to the joystick.
First and foremost, when multiple oroGen projects start to be involved, deployments quickly become hard to manage. The accepted workflow when you are starting to build a complete system is to create a dedicated “deployment project” that creates all the deployments that your system needs. In the case of these tutorials, it is the tutorials/orogen/tut_deployment oroGen project. Have a look at it, and make sure that it is built in your installation by either adding manually to autoproj/manifest or by building the whole rock.tutorials package set once and for all
Let’s now integrate the random motion generator. Modify scripts/02_services.rb to get this new random movement generator task:
using_task_library 'controldev'
using_task_library 'rock_tutorial'
using_task_library 'tut_brownian'
and change the use_deployment lines to match:
Syskit.conf.use_deployment 'rock_tutorial'
Syskit.conf.use_deployment 'joystick'
Syskit.conf.use_deployment 'brownian'
We also have to declare that the random motion generator does provide the CommandGeneratorSrv service. Add the following after the using_task_library statements:
TutBrownian::Task.provides Tutorials::CommandGeneratorSrv, :as => 'cmd'
and let’s make the instanciation fail again:
syskit instanciate scripts/syskit3.rb
This time, there is another error:
= cannot find a concrete implementation for 1 task(s)
| placeholder for Tutorials::CommandGeneratorSrv
| 2 candidates
| Controldev::JoystickTask,
| TutBrownian::Task
| child cmd of Tutorials::RockControl:0x7f6ff64c0780{conf => [default]}[]
There are now two concrete tasks providing the CommandGeneratorSrv service: The joystick and the random motion generator. Because the selection is ambiguous, Syskit refuses to proceed and bails out.
We therefore need to select it before the component network can be generated. In order to do that, we need to give more details when adding the composition, i.e. due to the two existing options for the CommandGeneratorSrv service, the ‘add_mission’ line at the end of the file is not specific enough anymore. We additionally have to tell which task should be used in specific for the given composition:
# Read this as: deploy a RockControl composition, using
# the TutBrownian::Task in places where it makes sense
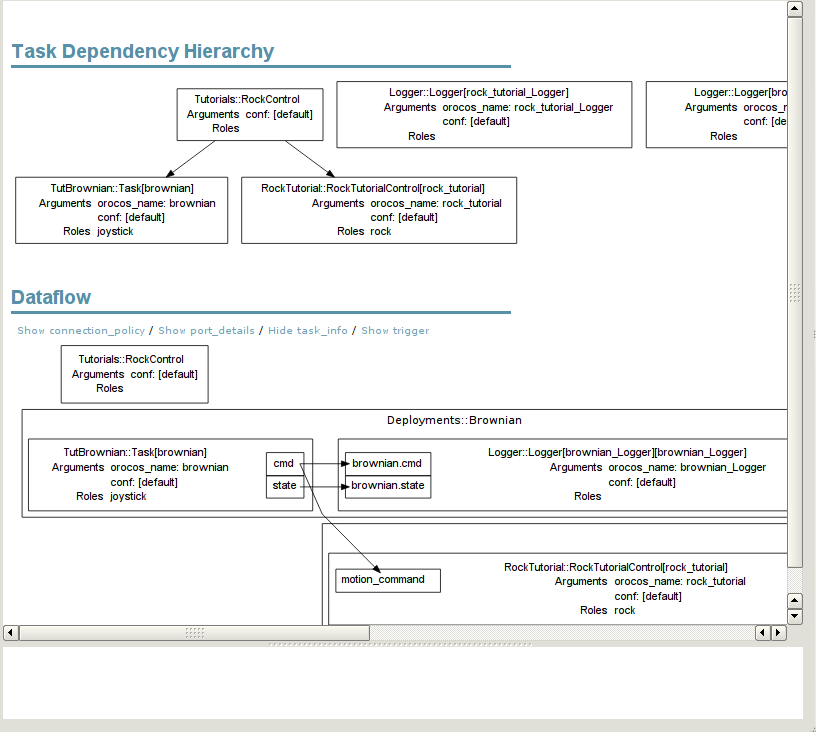
add_mission Tutorials::RockControl.use(TutBrownian::Task)
The ambiguity is now resolved and instanciating the component network will work just fine:
syskit instanciate scripts/02_services.rb
Running the final network
syskit run scripts/02_services.rb
Conclusion
In this tutorial, you got started with using data services, i.e. description of abstract components, and how to resolve ambiguities of different data sources at requirement time (when calling ‘add’) instead of doing it at modelling time (when creating the compositions)
The next tutorial deals with the runtime workflow when using the supervision: how to switch between different modalities / sources, how to restart components that crashed, …