The result of this tutorial can be found in bundles/tutorials if you followed the instructions at the bottom of this page. While the tip of the master branch contains the accumulated result of all the tutorials, you can get the specific result of this one by checking out the devices tag with
git checkout devices
So far, all components we have are equal, in the sense that they are seen by Syskit as transforming data. From the point of view of Syskit, if three components are needed in your network, everything is OK as long as you provide enough deployments.
However, there is one case where this assumption simply does not work: components that are related to hardware. Syskit cannot make a camera grow because your network requires it.1 Morevoer, these devices are also your system’s data sources: the data that is simply processed by other components originally comes from there.
For all these reasons, a Syskit-enabled system will in most cases have a robot description block, in which devices are described. This tutorial will show you how.
Joystick Device
The reason why the first tutorials asked you to remove the dependency on the rock bundle by deleting config/bundle.yml is that the joystick, obviously, is a device – and we would therefore have had to talk about devices way too soon.
We will now delete models/orogen/controldev.rb, so that the one from Rock is
picked up2. Then, run syskit browse, and have a look into the provided data
services of Controldev::JoystickTask.
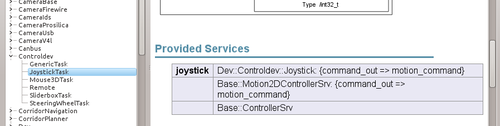
It provides Dev::Controldev::Joystick, which is a device type, and is declared in bundles/rock/models/orogen/controldev.rb with:
module Dev
module Controldev
device_type 'Joystick' do
provides Base::Motion2DControllerSrv
end
end
end
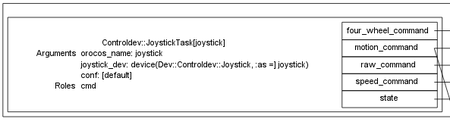
What you can also see in the same file is that instead of using ‘provides’ in the task context definition, one uses device_type:
class Controldev::JoystickTask
driver_for Dev::Controldev::Joystick, :as => 'joystick'
So far, this is the main difference between devices and data services:
- devices are defined using device_type instead of data_service_type
- one uses driver_for to declare that a task is a device driver instead of provides to declare that it provides a data service
For now, this are the only differences. For all other intent and purposes, a device type is a data service type.
Robot Definition
However, we also need to declare that we do have a joystick device. If we don’t, we will get an error from Syskit:
syskit instanciate -rtut joystick_def!
cannot find a device to tie to 1 task(s)
for Controldev::JoystickTask:0x3df5a18{conf => [default]}[]
child cmd of Tutorials::RockControl:0x3dd3710{conf => [default]}[]
no candidates for Controldev::JoystickTask:joystick
(Syskit::DeviceAllocationFailed)
Devices are declared within a robot block in profiles. Edit models/profiles/rocks.rb and add the following to the Rocks profile:
robot do
device Dev::Controldev::Joystick, :as => 'joystick'
end
as well as the obligatory loading code at the top of the file:
using_task_library 'controldev'
and finally select the device explicitly in the joystick definition:
define 'joystick', Tutorials::RockControl.
use(joystick_dev).
use_deployments(/target/)
Et voila ! The joystick is declared. Test this out by running
syskit instanciate -rtut joystick_def!
In the resulting network, have a look at the ‘joystick_dev’ argument for the JoystickTask task.
Devices are usable in profiles everywhere a data service type, task contexts, compositions and/or definitions are. They are accessible by using the name_dev notation (here: joystick_dev). For instance, one can select a particular device in a use() statement: ControlLoop.use(joystick_dev). Running a device driver from Syskit is done with e.g.
syskit run -rtut joystick_dev!
Declaring the ‘rocks’ as devices
As for the joystick, our tutorial rocks are also unique: they are “physical”. We should therefore also declare them as devices, to uniquely identify them in the network.
One tidbit: if you have tried, at some point, to run the brownian motion for both rocks, you would have had a pretty hard time. The reason, as you may have noticed right now, is that as long as you do not introduce a device in the brownian motion networks, they are identical. Syskit will therefore happily run a single brownian motion network, thus moving only one rock. What will allow to differentiate them is that we point to a particular unique device for each network to control.
The first step is to declare the device. The convention is to declare those in models/blueprints/devices.rb, into the Dev module, so let’s create the file and add
# Load the device file from the Rock bundle
require 'rock/models/blueprints/devices'
# Required for PoseSrv. Remember, this is
# given to you in syskit browse
require 'rock/models/blueprints/pose'
# Define the Rock device type. The 'platform' namespace is
# used to define whole platforms (e.g. the name of a commercial
# robot)
Dev::Platforms.device_type 'Rock' do
# All Rock device drivers provide the Rock pose
provides Base::PoseSrv
end
Then, we need to declare our tutorial ‘simulation’ component as a driver for this device. Since the RockTutorialControl task is in the rock_tutorial oroGen project, we edit models/orogen/rock_tutorial.rb and add
require 'models/blueprints/devices'
class RockTutorial::RockTutorialControl
driver_for Dev::Platforms::Rock, :as => 'driver'
end
And, finally, we declare our two rocks and modify the network declarations. In models/profiles/rocks.rb, the whole profile definition would look like
profile 'Rocks' do
robot do
device Dev::Controldev::Joystick, :as => 'joystick'
device(Dev::Platforms::Rock, :as => 'rock1').
use_deployments(/target/)
device(Dev::Platforms::Rock, :as => 'rock2').
use_deployments(/follower/)
end
define 'joystick', Tutorials::RockControl.
use(joystick_dev, rock1_dev)
define 'random', Tutorials::RockControl.
use(TutBrownian::Task, rock1_dev)
define 'random2', Tutorials::RockControl.
use(TutBrownian::Task, rock2_dev)
define 'random_slow', Tutorials::RockControl.
use(TutBrownian::Task.with_conf('default', 'slow'), rock1_dev)
define 'random_slow2', Tutorials::RockControl.
use(TutBrownian::Task, rock1_dev).with_conf('slow')
define 'leader', Tutorials::RockControl.
use(TutBrownian::Task, rock1_dev)
define 'follower', Tutorials::RockControl.
use(TutFollower::Task, leader_def, rock2_dev)
end
You can now have a look at all the networks. And for instance, you can
syskit instanciate -rtut random_def! random2_def!
The result is probably not what you expected:
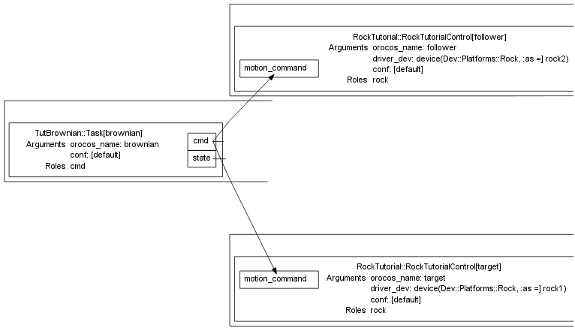
As stated when we introduced the device concept, devices are meant to identify data sources and sinks – which are very commonly hardware devices in actual robots. That’s what the brownian generator is as well, so we would need to also define a device for this one (this exercise is left to the reader ;-))
Let’s also make the follower definition fail:
$ syskit instanciate -rtut follower_def!
Cannot find a concrete implementation for 1 task(s)
Syskit::TaskContext placeholder for Base::PoseSrv
4 candidates
Tutorials::RockControl/[cmd.is_a?(TutFollower::Task)],
Tutorials::RockControl,
Tutorials::RockControl/[cmd.is_a?(TutFollower::Task)],
RockTutorial::RockTutorialControl
child target_pose of Tutorials::RockControl/[cmd.is_a?(TutFollower::Task)]:0x48ce390{conf => [default]}[]
This time, the main issue is that Syskit cannot pick something for the target_pose child of the RockControl composition. Weird … We did give him the leader_def definition in the use() statement.
Actually, not so weird: rock2_dev is also a provider for Pose, and there is therefore conflict. As a general rule of thumb, if a data service is left unallocated, it means that you have to explicitly state which child the model you provided should replace, in our case, target_pose
Important: the explicit selections MUST go at the end of the use() statement. This is required by the Ruby syntax. If you find this ordering constraint confusing, you can also add multiple use() statements.
define 'follower', Tutorials::RockControl.
use(TutFollower::Task, rock2_dev, 'target_pose' => leader_def).
use_deployments(/follower/)
Summary
This tutorial led through the reason why the concept of devices is needed when using Syskit, and what you should define as devices. In the next tutorial, we will see how to split the profile definitions between a generic profile and more specialized ones, for instance to deal with real robot vs. simulated robot differences while reusing as much as possible.
-
to be perfectly clear, one could use Syskit to determine that (1) a new camera is required (2) reconfigure the hardware to install a new camera and (3) modify the Syskit models on the fly to reflect this change. However, that’s not Syskit’s job: its job is to determine that right here, right now, a required network cannot be deployed because one camera is missing. ↩
-
when loading extension files in models/orogen, the first matching one in the dependency chain is picked. You can manually load the already existing one (if you want to do so) by adding the corresponding require line. ↩