Abstract
This tutorial will give you some hands-on experience on:
- How to add configuration support for your component and
- how to embed that configuration into the Ruby script.
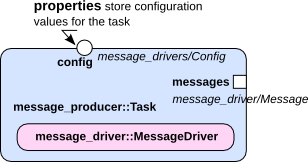
Components and underlying libraries often need to be configured before starting them. This tutorial will teach you how to use the oroGen component’s properties to map to your library configuration option, and how to add the functionality to the oroGen component.
At the end of this tutorial, the component will look like:
Let’s go back into the MessageDriver library:
acd message_driver
Configure a component
Some libraries will require configuration before you can use them, e.g. here we want to add a property to the MessageDriver library to configure if the produced message should be presented in uppercase or not. Therefore, “cd” into the message driver library (~/dev/tutorials/message_driver).
Add the configuration object code to src/Config.hpp in the message driver library:
#ifndef _MESSAGE_DRIVER_CONFIG_HPP_
#define _MESSAGE_DRIVER_CONFIG_HPP_
namespace message_driver
{
/**
* This configuration struct is a simple example of what you
* can do in order to wrap multiple configuration properties
* into a single object
*
* This way you can manage configuration properties by grouping
* them into struct, and you don't have to change the oroGen
* components interface when your configuration object changes
*/
struct Config
{
bool uppercase;
Config()
: uppercase(false)
{
}
};
}
#endif // _MESSAGE_DRIVER_CONFIG_HPP_
Then adapt the message driver class (in src/MessageDriver.cpp and src/MessageDriver.hpp):
MessageDriver.hpp:
#include <message_driver/Message.hpp>
#include <message_driver/Config.hpp>
...
/**
* MessageDriver configuration
* \param config Configuration object
*/
MessageDriver(const Config& config = Config());
...
private:
Config mConfig;
MessageDriver.cpp:
...
#include <algorithm>
...
Message MessageDriver::createMessage()
{
Message msg("Message from MessageDriver");
if(mConfig.uppercase)
std::transform(msg.content.begin()
, msg.content.end()
, msg.content.begin()
, toupper);
return msg;
}
...
MessageDriver::MessageDriver(const Config& config)
: mConfig(config)
{
}
...
Update the build configuration in src/CMakeLists.txt
This makes sure that the configuration header will also be installed.
Remember: The build configuration can be found here:
~/dev/tutorials/message_driver/src/CMakeLists.txt
Update the file as follows:
rock_library(message_driver
SOURCES MessageDriver.cpp
HEADERS MessageDriver.hpp Message.hpp Config.hpp
DEPS_PKGCONFIG base-types)
Embed the configuration property into the oroGen component
Since we want a specific configuration step, the new task should not be started without configuration, which should already have been set by adding the statement ‘needs_configuration’ in the task description in the orogen file.
In order to embed the configuration property into the oroGen component, we will have to do the following steps:
- declare the property in the messages.orogen specification file (in ~/dev/tutorials/orogen/messages).
- move the construction/destruction of the driver from the task’s constructor and destructor into configureHook / cleanupHook.
The final version of the component’s code is in branch ‘with_config’ of basic_tutorials/orogen/message_producer (git checkout with_config).
(1) We modify the task description in the messages.orogen file. We add a property of the configuration type as follows (see also Task Interface).
(2) Since we want a specific configuration step, the new task should not be started without configuration, i.e. this is why we add the statement ‘needs_configuration’.
import_types_from "message_driver/Config.hpp"
task_context "Producer" do
needs_configuration
property "config", "message_driver/Config"
...
task_context "Consumer" do
needs_configuration
property "config", "message_driver/Config"
...
end
(2) Finally, we remove the allocation and deallocation from the constructor and destructor, since it will be moved into the configureHook and the cleanupHook:
In ~/dev/tutorials/orogen/messages/tasks/Producer.cpp:
bool Producer::configureHook()
{
if (! ProducerBase::configureHook())
return false;
message_driver::Config configuration = _config.get();
mpMessageDriver = new message_driver::MessageDriver(configuration);
return true;
}
void Producer::cleanupHook()
{
ProducerBase::cleanupHook();
delete mpMessageDriver;
}
Build the task
Now, build the task: Assuming that you are in the message_producer folder or in one of its subfolders call:
amake
Embedding configuration into the ruby script
Now, “cd” into your folder ~/dev/tutorials/orogen/messages/scripts, and copy ‘start.rb’ to a new file ‘configure.rb’ - you will reuse ‘start.rb’ at a later stage. Modify ‘configure.rb’ according to the following code block:
require 'orocos'
include Orocos
Orocos.initialize
Orocos.run 'messages::Producer' => 'messages' do
messages = Orocos.name_service.get 'messages'
# 'config' is the name of the property
messages.config do |p|
p.uppercase = true
end
# Call to configure is required for this component
# since it has been generated with 'needs_configuration'
messages.configure
messages.start
reader = messages.messages.reader
while true
if msg = reader.read_new
puts "#{msg.time} #{msg.content}"
end
sleep 0.5
end
end
Run it
Now you can run the script.
ruby configure.rb
Again, you should see something similar to the following. You can switch between uppercase and mixed case printing by using your newly defined configuration options. With the script above, you should see something like the following:
Wed Aug 03 09:40:28 +0200 2011 MESSAGE FROM MESSAGEDRIVER
Wed Aug 03 09:40:29 +0200 2011 MESSAGE FROM MESSAGEDRIVER
Use a configuration file
Property values can be read from a file, what is especially handy in case of more properties to set. The configuration file is a yaml-file which organises the properties in a structured way. For the present example, create a file, e.g. messages_config.yml with the following content:
\--- name:default
config:
uppercase: True
Note that yaml uses indentation for organizing the data. The script can now be changed to use this file. Instead of
# 'config' is the name of the property
messages.config do |p|
p.uppercase = true
end
put
# load property from configuration file
messages.apply_conf_file("messages_config.yml", ["default"])
The result when running the script should be the same as above. It is possible to have one configuration file per task context and then load the properties for each task from the corresponding file. Of course the properties in the file have to match the properties given in the orogen definition. A good way to create a proper configuration file is to generate such a file from the task model definition. To do so, run the following command from the shell:
oroconf extract messages::Producer --save messages.yml
oroconf is the command to access the configuration of tasks. It can do more than extracting configuration files (--help), but we will stick to the command extract for now. The first argument after extract gives the task model which is the orogen name plus double colon plus task name. Behind --save, the file is given to which the data should be written. You might note that there are some variations to the hand written file:
\--- name:default
# no documentation available for this property
config:
uppercase: false
In this file, uppercase is false, which is the default setting for the property (see configuration constructor). A comment before the declaring the property is automatically picked up as documentation line.
# Configuration property for the message driver
property("config","message_driver/Config")
The first line is the name for the configuration. It is possible to have multiple configurations in one file which can be distinguished by their name. Think of a file called ‘messages_multi.yml’:
\--- name:default
# Configuration property for the message driver
config:
uppercase: 0
\--- name:uppercase
# Configuration property for the message driver
config:
uppercase: 1
Then one can apply the uppercase configuration with
# load property from configuration file
messages.apply_conf_file("messages_multi.yml",
["uppercase"])
For more information on configuration files, have a look here.
Dynamic properties
“Normal” properties - such as the ones dealt with in the preceding tutorial - should only be used for the starting configuration of the component and should not be changed at runtime. If a component allows dynamic changes of properties, those have to be declared explicitly as explained hereafter.
The framework automatically creates a callback function which is called within the task’s thread. This function makes it possible that changes of properties can be accepted or rejected if they are invalid.
In the messages.orogen file, a dynamic property must be declared as follows:
property("some_dynamic_property","double",0.1).dynamic
Inside the task, the declared function will look as follows:
bool Task::setSome_Dynamic_Property(double value)
{
//Implement the needed steps here
return(orogen_name::TaskBase::setSome_Dynamic_Property(value));
}
Note that if you modify a task which already exists, the code must be copied out of the templates/tasks folder!
The base class is called to make sure that superordinated tasks are called and properties can be changed by those tasks. If a superordinated task rejects the changes, the return value should be false.
If the task has not yet been configured, consequently is not in a running or stopped state, the callback will NOT be triggered in case of an external change of the property. What will happen, in that case, is that the property _some_dynamic_property will be updated.
As a simplification for the user, if a task has dynamic properties, a callable function is generated which calls all callback functions with the new parameters. By calling updateDynamicProperties() inside the configure hook after the component is set up, the changes of the dynamic properties can be applied, avoiding code duplication.
Special case inheriting tasks
If a non-dynamic property shall become dynamic inside the inheriting task, it must be declared as follows in the messages.orogen file:
make_property_dynamic("some_non-dynamic_property")
Summary
In this tutorial, you have learned:
- How to embed configuration into an oroGen component.
- How to use the templates/ subfolder of an oroGen component.
- How to set configuration properties for your component in a ruby script.
- How to generate and use configuration files.
In the next tutorial, you will learn how to create a data driven component and how to connect it to an existing component.
Progress to the next tutorial.