What are oroGen and typeGen
oroGen is a specification language and code generator for the Orocos Realtime Toolkit (RTT). Orocos RTT is a C++ library allowing to build component-based systems. The orogen tool allows to create new components easily.
In oroGen, one writes a specification that describes the component you want to develop. Then, orogen generates the corresponding C++ code and CMake build system so that you – the component developer – has only to care about implementing the actual functionality.
oroGen has a smaller sibling, typeGen, that can be used to generate standalone typekits
In any case, the following documentation is meant
Tutorials
The Rock tutorials are a great introduction to oroGen concepts and development workflow within Rock
The Development Workflow
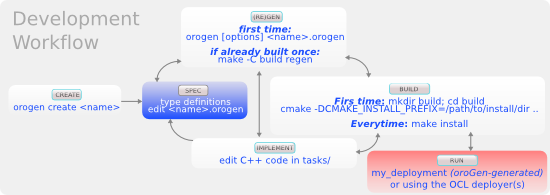
The most important point is that you cannot use your component/typekit before you have installed it. So, don’t forget to do ‘make install’
The Runtime Workflow
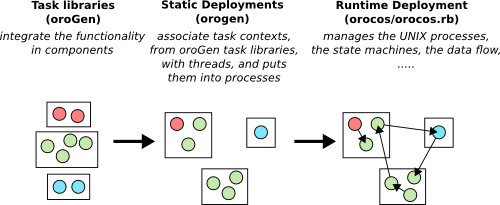
One very important point when developing with Rock (actually, with Orocos/RTT components), is that the system deployment is separated from the component implementation.
What it means in practice is that a task context (a.k.a. “RTT component”) is a standalone C++ class that can be integrated in different ways, instanciated multiple times and so on.
oroGen keeps that separation. When you define components in oroGen, you create a task library, which is a shared library in which the task context classes are defined. Then, you need to put these libraries in deployments (which is also done by oroGen). Finally, you can start these deployments, connect the tasks together, monitor them using either the orocos.rb Ruby bindings or the advanced system deployment. They can also be used as targets for log replay.